
| chercheursduvrai.fr |
 Aide Aide
 Recherche Recherche
 Membres Membres
 Calendrier Calendrier
|
| Bienvenue invité ( Connexion (Log In) | Inscription (Register) ) | Recevoir à nouveau l'email de validation |

 To view this board in english, you must be registered.
To view this board in english, you must be registered.
| Pages: (2) 1 [2] ( Aller vers premier message non lu ) |    |





|
Ecrit le: Lundi 02 Janvier 2017 à 14h39


|
|
 Expert(e)  Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Le projet continu d'avancer. L'axe Z est terminé d'un point de vue mécanique et électrique. Il est possible de lancer la POM de l'axe Z avec le GRBL par la fonction $H. L'axe Z bouge à 1600 mm/min. Il est aussi possible de lancer une fonction de palpage avec le G-code G28.2 celui ci s'arrête grâce au capteur de force. Il reste du boulo en automatisme : calcul d'usure de mine et cycle de rechargement du criterium. Du côté des axes roulants X et Y j'ai des problème de friction pour le moment ! J'ai tenté de faire différant réglage de la précharge horizontal des billes grâce au galet mobile de réglage de jeu à l'inversion. Mais rien n'y fait pour le moment ! ça glisse entre le galet d'entrainement et la bille, la bille ne tourne pas ! Le poids du tripod sur les billes provoque un coincement des billes en rotation. Je vais devoir mettre en place 2 ballcasters supplémentaires, réglable en hauteur, ils serviront à soulager du poids de l'objet sur les billes. cela me permettra de pouvoir régler la précharge sur les bille dans le sens verticale... 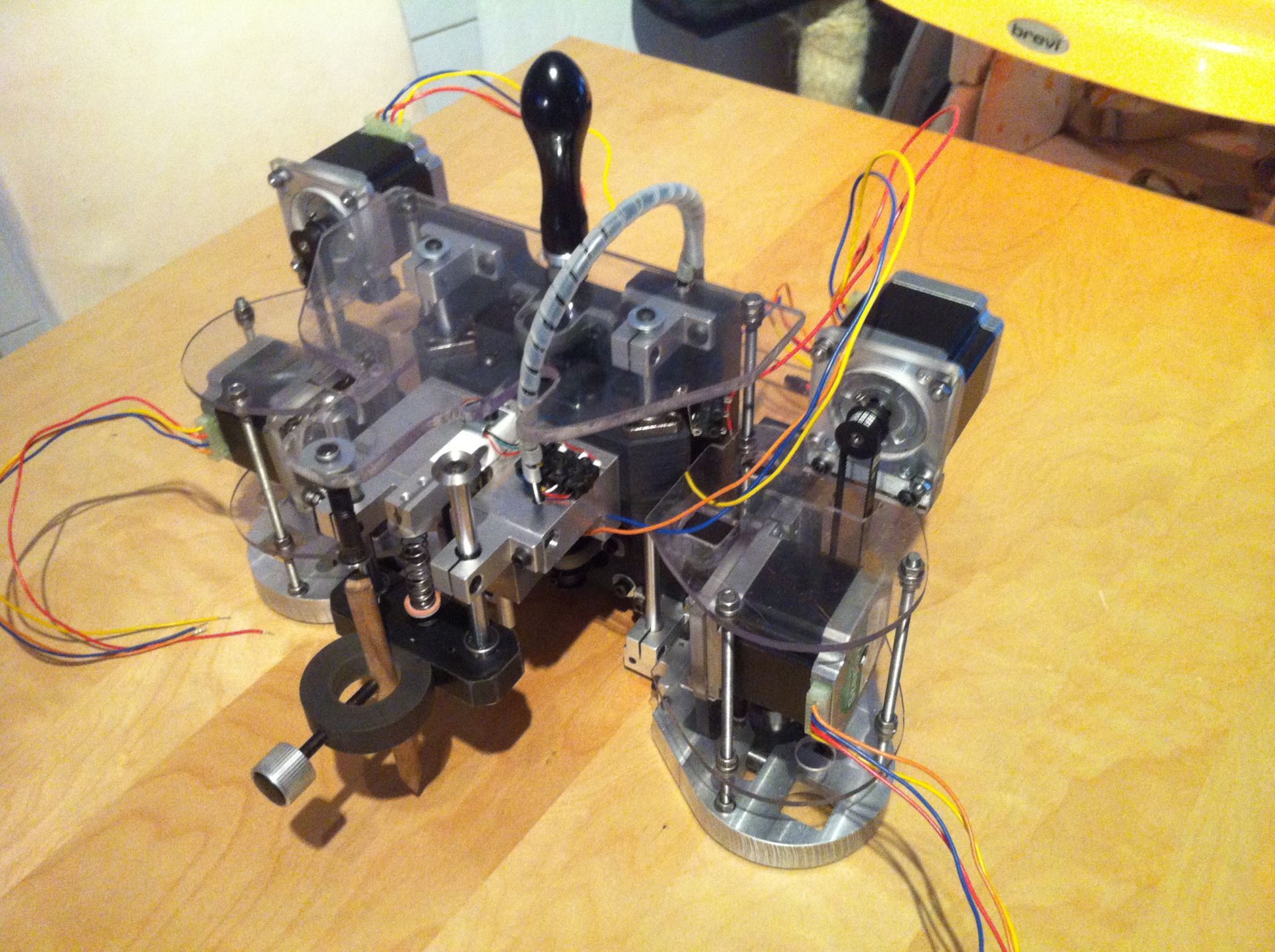 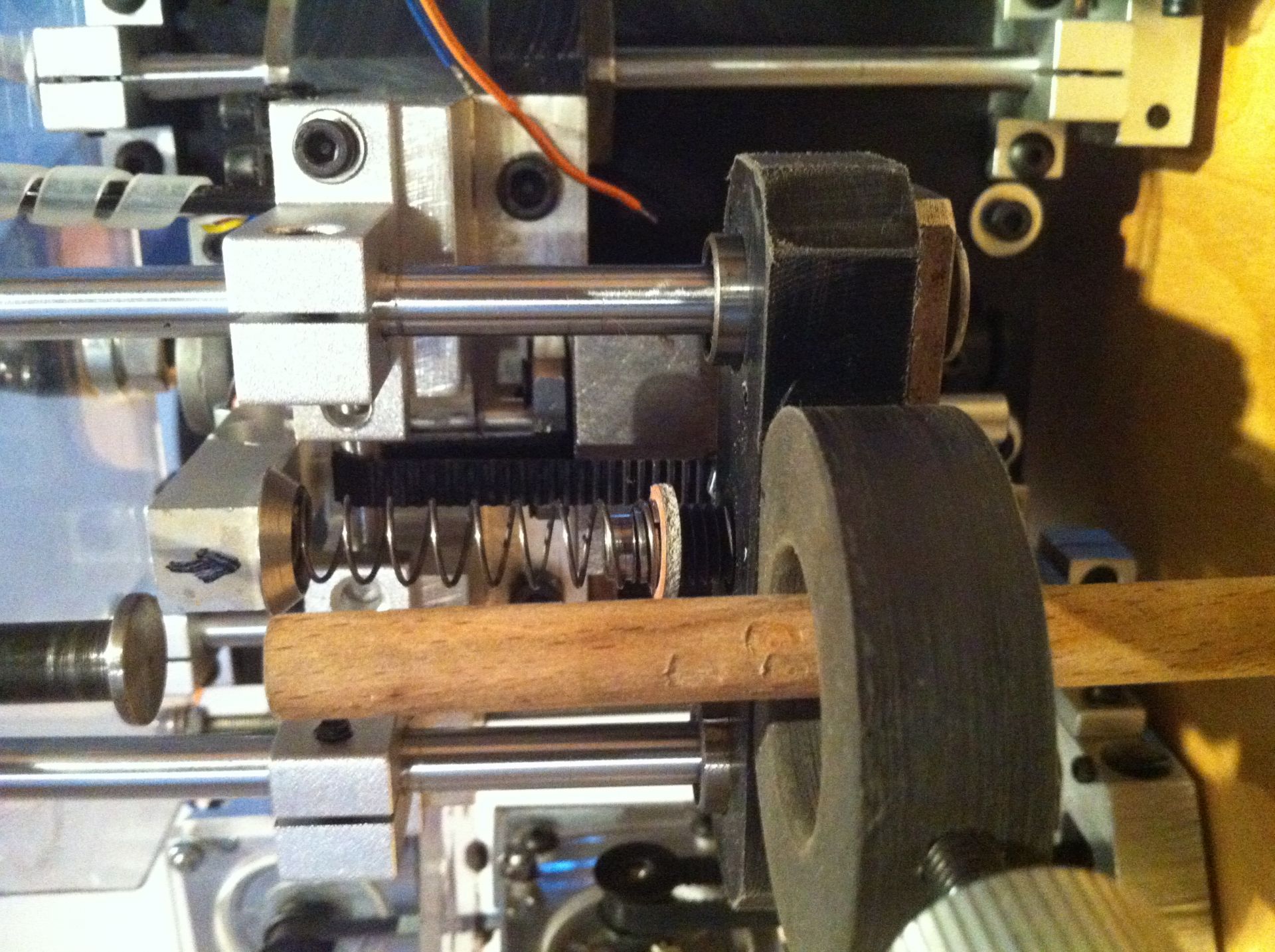 -------------------- Votre colas qui vous aimes.
|
 

|
LightInWay |
Ecrit le: Vendredi 06 Janvier 2017 à 16h16
|
|
Unregistered |
C'est vraiment du très joli travail. ça sera intéressant de le voir fonctionner... tu dois en être impatient!
|
|
|
|
Ecrit le: Mardi 10 Janvier 2017 à 21h25
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Oui énormément !
Je ne pensais pas qu'il y aurait tant de travail à accomplir pour atteindre l'objectif ! il me reste une dizaine de fil à souder avant de pouvoir commencer la programmation des tourelles d'entrainements. -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Samedi 11 Mars 2017 à 10h38
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
bon je viens au nouvelle,
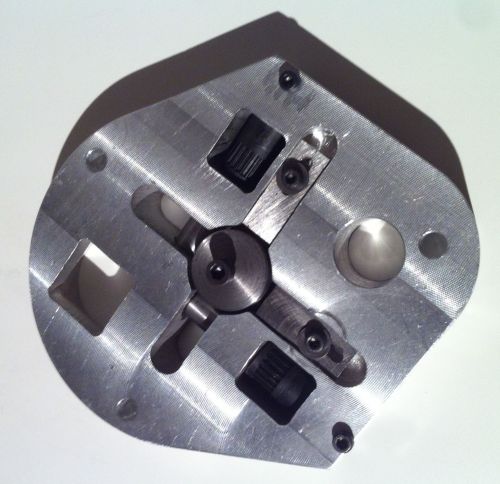
les balles rebondissante c'est un échec : les premières étais remplis d'eau et bien molle ! les seconde étaient bien en plastique dur, mais l’assemblage du moulage est catastrophique ainsi que la géométrie de la ball pas de diametre constant et pas le meme diamètre entre les deux ball ! du coup j'ai trouver les shères en pierre qui servent de presse papier en diam 50mm.  voici le plan d'usinage des nouvelles tourelles d'entrainement : 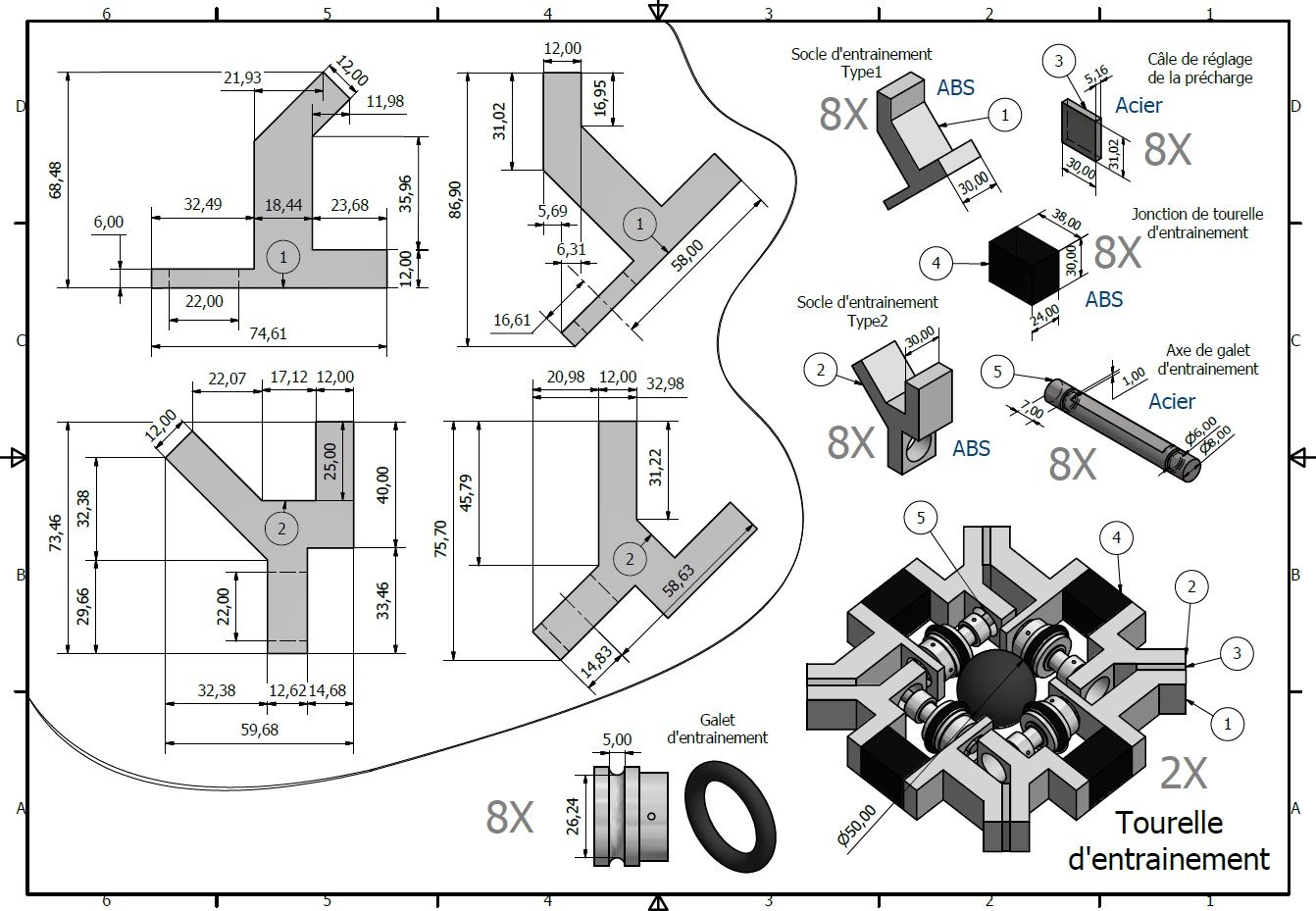 Maintenant les galets sont en matière adhérente avec un couple bien meilleur... a suivre -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Lundi 03 Avril 2017 à 23h09
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Voici un avancement de l'usinage et de l'assemblage des tourelles d'entrainement conforme au plan :
    Toutes les pièces ont été faite en séries ; je règle la fraiseuse conventionnelle en position avec la visu et j’utilise des cales pour positionner mes pièces... Chaque passe de chaque pièce ont été faite avec les même réglages..... Donc toutes les pièces sont bien identique à +/-.02mm Les usinages à 45° n'ont pas été obtenu en tournant la tête de la fraiseuse. j'avais peur de pas être assez précis, j'ai rien pour mesurer l'angle correctement avec finesse. J'ai utiliser des "V" et un étau.   Afin de bien dégauchir les pièces, je me suis fait un petit gabarit d'assemblage:  La procédure d'assemblage que j'ai mis en place est la suivante : Je plaque l'ensemble sur la surface à 45° de gauche du gabarit, puis je pince mon axe pour garantir son alignement, enfin je serre mes vis d'assemblage. je contrôle avec un comparateur le point haut de l'axe (le pied magnétique fixe sur la table en glissant la pièce sur le marbre) ; près du 1er roulement ; puis près du second. Les écarts de hauteur ne dépassent pas les 0.05 mm. Mise en place de goupille :  -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Lundi 03 Avril 2017 à 23h18
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Vue d'ensemble de l'avancement :  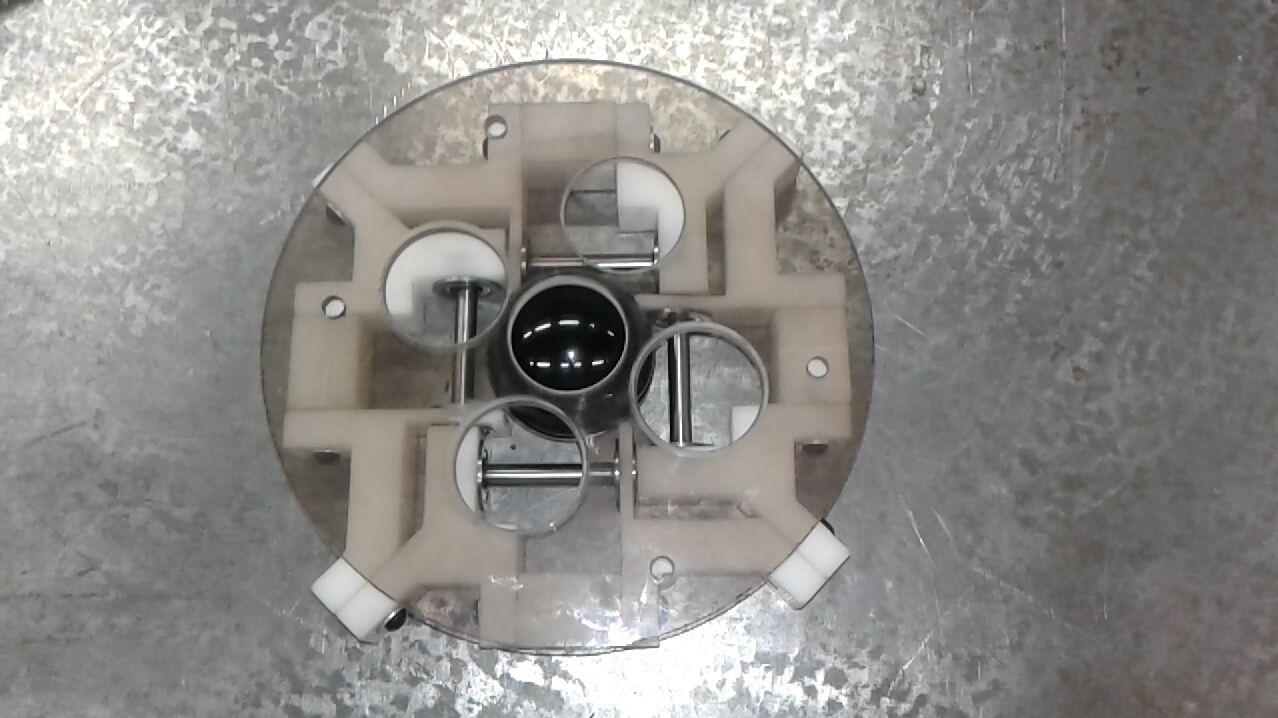 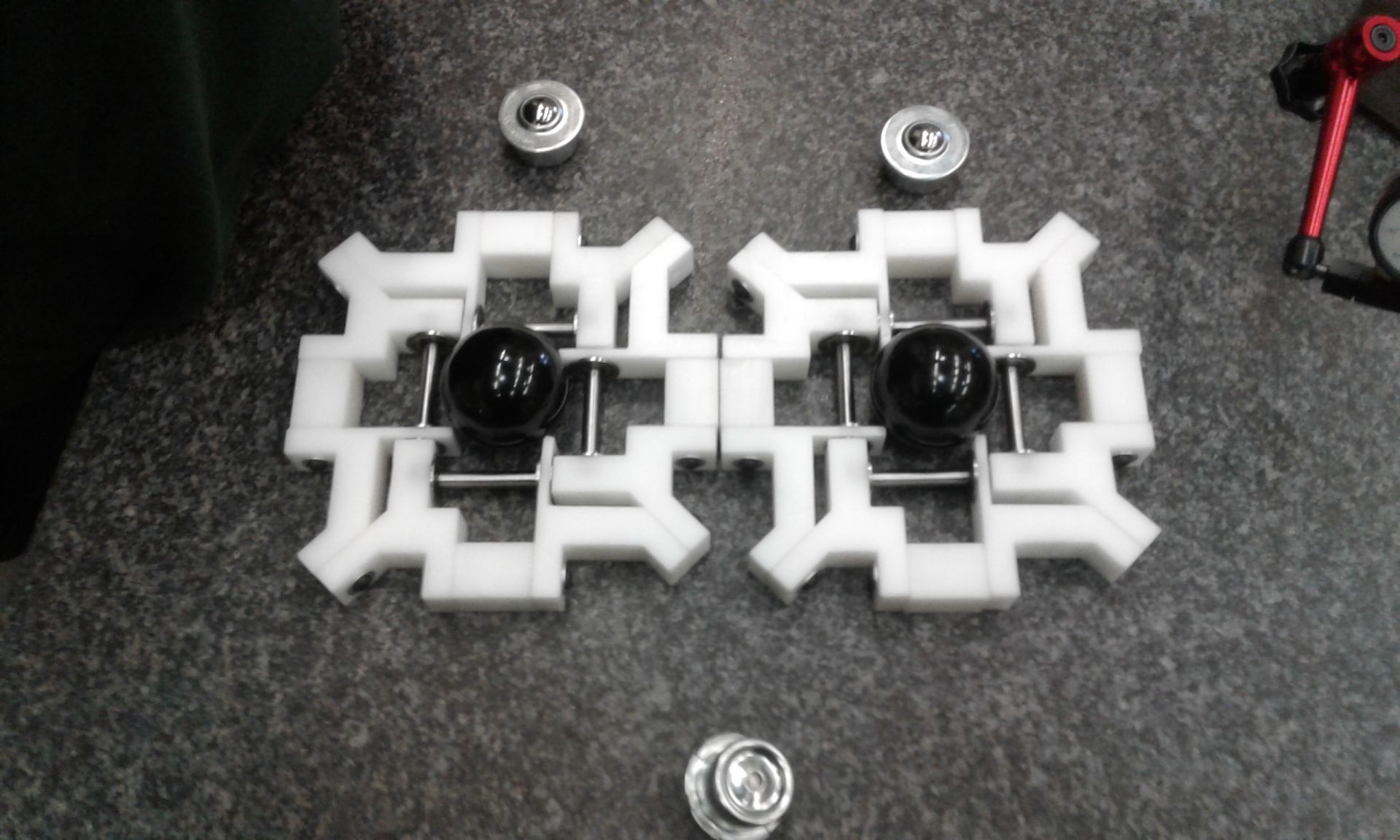 @++ -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Mardi 04 Avril 2017 à 00h05
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Avec le temps qui passe je trouve que Tripod n'est pas un très bon choix pour le nom de ce robot.
j'aimerais bien avoir vos avis -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Jeudi 06 Avril 2017 à 10h27
|
|
 Expert(e) Groupe: Membres Messages: 2108 Membre n°: 10443 Inscrit le: 08/11/2013 |
Je me demande bien comment ce truc tient debout
 Les boules en pierre, c'est de l'obsidienne? |
|
|
|
Ecrit le: Jeudi 06 Avril 2017 à 11h00
|
|
|
Expert(e) Groupe: Membres Messages: 2108 Membre n°: 10443 Inscrit le: 08/11/2013 |
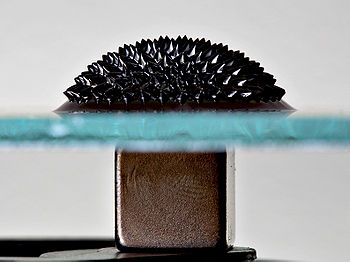
Une piste serait que la bouboule est constituée d'aimants 'de mini ou micros aimants nord et sud, intercalés
les uns à côté des autres et dirigés par des mini solénoïdes, façon moteur pas à pas et tout un programme informatique, derrière |
|
|
|
Ecrit le: Vendredi 07 Avril 2017 à 18h47
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
Salut p'titjoule
A mon avis ce truc tiens debout par des trains d'ondes dans la boule. Je pense à des inductions sous forme de train d'onde de courant de Foucault dans la matière de la boule qui génère le mouvement.  je vois ça en version sphérique, et sur deux axes de déplacement... tu peux choisir le sens géométrique d'induction grâce à plusieurs bobines... Ensuite je me disais, si il assure la sustentation et le positionnement du bordel ! il dois consommer à fond, des hW je pense. -------------------- Votre colas qui vous aimes.
|
|
|
|
Ecrit le: Vendredi 07 Avril 2017 à 19h33
|
|
|
Expert(e) Groupe: Membres Messages: 2108 Membre n°: 10443 Inscrit le: 08/11/2013 |
Ce que je pense, c'est qu'un truc comme celui là fini par pencher et tomber, et d'ailleurs, il le rattrape plein de fois,
l'idée est peut-être bonne, mais il faut trois boules pour avoir la stabilité et la précision |
|
|
|
Ecrit le: Samedi 08 Avril 2017 à 20h53
|
|
|
Expert(e) Groupe: Membres Messages: 481 Membre n°: 10156 Inscrit le: 30/08/2012 |
J'ai que deux boules et je tiens debout. Mdr.
Non je pense que c'est une question de temps de calcul et de réactivité des actionneurs. -------------------- Votre colas qui vous aimes.
|
|
|
0 utilisateur(s) sur ce sujet (0 invités et 0 utilisateurs anonymes)
0 membres:
 Pages: (2) 1 [2] Pages: (2) 1 [2] |
|
[ Script Execution time: 6.1033 ] [ 12 queries used ] [ GZIP activé ]