
| chercheursduvrai.fr |
 Aide Aide
 Recherche Recherche
 Membres Membres
 Calendrier Calendrier
|
| Bienvenue invité ( Connexion (Log In) | Inscription (Register) ) | Recevoir à nouveau l'email de validation |

 To view this board in english, you must be registered.
To view this board in english, you must be registered.
| Pages: (242) « Première ... 112 113 [114] 115 116 ... Dernière » ( Aller vers premier message non lu ) |    |
|
Ecrit le: Dimanche 23 Novembre 2008 à 21h28


|
|
 Expert(e)  Groupe: Membres Messages: 100 Membre n°: 4725 Inscrit le: 02/09/2008 |
Salut à tous,
mp-avenir en y réfléchissnt j'hésiterais carrément pas à faire une cassure franche et net pour être certain de l'éfficacité de la pesanteur pour libérer l'aimant sortant. Je me permet une fois de plus de modifier ton schémas ...  -------------------- |
 

|
|
Ecrit le: Dimanche 23 Novembre 2008 à 21h55
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
J'y pensais aussi.. Et rajouter plus de profondeur également..
Enfin il doit y avoir un bon réglage à trouver ! |
|
|
|
Ecrit le: Dimanche 23 Novembre 2008 à 22h11
|
|
 Expert(e) Groupe: Membres Messages: 2064 Membre n°: 275 Inscrit le: 11/06/2007 |
Juste pour rire.
J’ai demandé à un gars du CNRS cet après-midi, le nom d'un logiciel de simulation, avec du magnétisme . Il utilise « Comsol » Cela à l’air bien, « Consol Multiphysics 3,5a », mais compliqué… http://www.comsol.fr/products/ Le tarif d'une licence mono-poste de COMSOL Multiphysics est de 7995€. Plus modules optionnels débutant à 1995€. … http://www.comsol.fr/press/pr/051115.php ******** Jys 17 et Mp_avenir / si vous faites une chausse trappe pour sortir de l'attraction du gros aimant, l’autre aimant devra fournir le travail moteur supplémentaire pour que l’alter ego remonte la pente. Tandis qu’une descente puis une remontée est en principe nulle, avec l’inertie. |
|
|
|
Ecrit le: Dimanche 23 Novembre 2008 à 22h31
|
|
|
Expert(e) Groupe: Membres Messages: 100 Membre n°: 4725 Inscrit le: 02/09/2008 |
Salut à tous,
Gegyx c'est quoi une chausse trappe ? -------------------- |
|
|
|
Ecrit le: Dimanche 23 Novembre 2008 à 22h32
|
|||||
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
arf oui, en effet. Il faut un minimum de progressivité dans la pente.
ouch.. |
||||
|
|
|
Ecrit le: Dimanche 23 Novembre 2008 à 22h43
|
|
|
Expert(e) Groupe: Membres Messages: 100 Membre n°: 4725 Inscrit le: 02/09/2008 |
Salut à tous,
J'ai éssayé de créer une pente douce cette fois-ci de telle sorte que le point le plus bas de la pente se trouve juste après le point fort pour garder l'effet de la vitesse en prime...  -------------------- |
|
|
|
Ecrit le: Dimanche 23 Novembre 2008 à 22h47
|
|||
 Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Mais c'est donné, Gegyx, j'achète ... quand j'aurais gagné à l'Euro Million ! Merci quand même. mp-avenir, souviens toi de la petite vidéo où il y avait 2 billes identiques qui partaient en même temps et à la même hauteur, celle qui descendait et remontait de sa piste arrivais légèrement plus tôt que l'autre et de façon inexplicable. Je n'ai pas retrouvé le lien, il est quelque part ici sur ce forum. Il y a peut être quelque chose à creuser et à utiliser pour votre montage. A+ |
||
|
|
|
Ecrit le: Dimanche 23 Novembre 2008 à 22h53
|
|
|
Expert(e) Groupe: Membres Messages: 100 Membre n°: 4725 Inscrit le: 02/09/2008 |
Salut à tous,
J'me souviens de cette vidéo. je cherche le lien. merci Derfla -------------------- |
|
|
|
Ecrit le: Dimanche 23 Novembre 2008 à 23h32
|
|||
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
cherched, trouved. to be continued. |
||
|
|
|
Ecrit le: Lundi 24 Novembre 2008 à 10h00
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonjour à tous,
Jys17 et Mp-avenir, j'aimerais attirer votre attention sur une chose qui me chicane dans le concept que Jys17 nous a présenté et que vous avez développé tous les deux. La rampe posera problème au niveau pratique: les forces verticales d'attraction entre stator et rotor sont non seulement inutiles et gênantes , mais surtout à cause du grand bras de levier nécessaire à l'entrée de la rampe. Pour éliminer ces forces parasites je verrais une rampe qui élimine ces forces verticales au plan de rotation du rotor. Il y aura de grosses difficultés pratiques pour réaliser des bras à charnières qui doit pas se plier à l'entrée mais uniquement à la sortie. Mais impossible c'est pas français. Autres points : On a une force d'attraction maximum x à l'entrée de la rampe et on a une force de rétention maximum y à la sortie de la rampe. y est un multiple de x en raison d'un champ magnétique plus puissant qu'à l'entrée . Donc pour pouvoir arracher le bras à la sortie il faut au moins qu'une condition soit satisfaite , à savoir que le rapport des bras de levier soit plus grand que le rapport des forces maximum Y/x. L'autre condition, considération , c'est l'aspect énergétique du système qui normalement devrait plomber la solution. Votre voie mérite d'être explorée et je ne puis que vous encourager dans cette voie. J'espère n'avoir pas été trop critique. Bon courage à tous. |
|
|
|
Ecrit le: Lundi 24 Novembre 2008 à 14h23
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
Le problème si on ajoute une 2ème rampe (en bas donc) pour annuler la force verticale, c'est qu'on perd du coup l'intérêt du dénivellé en fin de course vu que le bras en se baissant va rapprocher l'aimant de la rampe inférieure. Je serai plutôt d'avis d'ajuster la masse des glisseurs aimantés et/ou des roulettes latérales de façon à avoir en tout point du mouvement une force de gravité vers le bas au moins égale à la force magnétique vers le haut.
Autre solution : placer la rampe sur le même plan que le rotor, je posterai un schéma de l'idée mais ça ne devrait pas être très compliqué. |
|
|
|
Ecrit le: Lundi 24 Novembre 2008 à 15h24
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
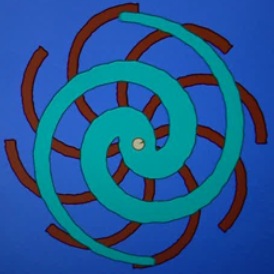
ébauche du système :
 Les aimants sont fixés et c'est le bras qui circule dans le moyeu central, sous la poussée des roulettes latérales qui prennent appui sur la rampe. |
|
|
|
Ecrit le: Lundi 24 Novembre 2008 à 16h06
|
|
 Expert(e) Groupe: Membres Messages: 1753 Membre n°: 291 Inscrit le: 13/06/2007 |
Bonjour à tous,
mp_avenir, sans vouloir ouvrir ma science, c’est ma dernière intervention sur ce sujet : Depuis le début l’idée de Jy17 était d’utiliser un levier, idée intéressante de mon point de vue !! Hors depuis le début il n’y à aucun levier !! Un simple glissement tantôt des neos tantôt de la barre qui les maintiens, Je persiste, la réponse à la question et dans la question (c’est un system d’équilibre qui va demander au néos extérieur beaucoup de force pour pousser son copain vers la périphérie ! ce truc ne fera jamais un tour en l’état, à moins de réfléchir à un vrai levier ! J’essaye !! A++ |
|
|
|
Ecrit le: Lundi 24 Novembre 2008 à 17h54
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
Ben pour moi il y a un levier de par le fait que d'un côté on a une force faible sur un bras important, et de l'autre une force freinante forte sur un bras court..
Par contre si on s'en tient au bilan théorique des travaux, effectivement ça ne peut pas marcher : l'aimant entrant va fournir un travail W1 en se déplaçant naturellement vers le point le plus fort de la rampe; Pour le faire sortir de ce "puit de potentiel" il faudra lui donner un travail W2 = W1. Or ce travail est exactement fourni par l'aimant opposé. Donc au mieux on a un bilan nul, à moins que la rampe soit surunitaire mais dans ce cas pas besoin de s'embéter avec des leviers. De toute façon si on applique les principes physiques connus, rien ne marche alors.... edit : pour compléter ma pensée, j'ai la nette impression qu'essayer d'adjoindre une quelconque astuce mécanique pour rendre surunitaire une configuration magnétique est inutile. A moins de jouer avec la gravité, mais tous les systèmes ont échoué... Le magnétisme ou l'électro-magnétisme, c'est la voie prometteuse, avec l'utilisation du fer et des écrans qui canalisent le champ |
|
|
|
Ecrit le: Lundi 24 Novembre 2008 à 18h12
|
|
|
Expert(e) Groupe: Membres Messages: 100 Membre n°: 4725 Inscrit le: 02/09/2008 |
Salut à tous,
Pour thx4 : 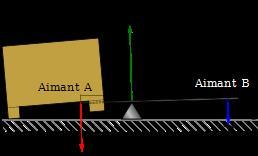 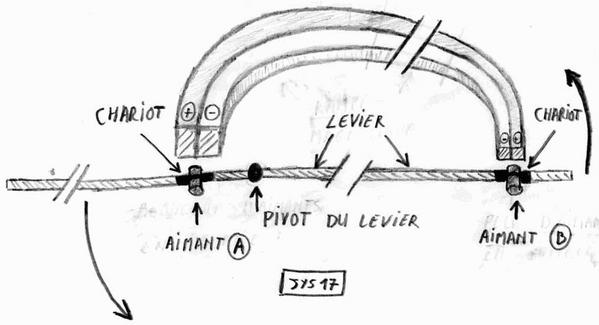 -------------------- |
|
|
|
Ecrit le: Lundi 24 Novembre 2008 à 18h40
|
|||
|
Expert(e) Groupe: Membres Messages: 1753 Membre n°: 291 Inscrit le: 13/06/2007 |
Mp_avenir, Je te rejoins totalement dans ce raisonnement !! |
||
|
|
|
Ecrit le: Mardi 25 Novembre 2008 à 12h25
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
Bonjour m'sieur dames.
il m'a été dit : tu as reçu gratuitement, donne gratuitement. voila 2 capture video , sous phun. toutes les jonctions articulées (joints) sont 'chargées' a 0.4Nm pour simuler des roulements 'réels'. les masses en bout de bras par rapport aux masses des 'articulations' ont un rapport 3/2 ( c'est le meilleur rapport que j'ai trouvé pour un fonctionnement optimal de l'engin) j'ai réalisé plusieurs engins, de 5 a 8 bras. c'est le modele 'octogone' qui est présenté dans les vidéos. elles sont un peut lourdes , et pas trop bien compressées, mais j'ai fait de mon mieux avec 'virtualdub' . agrandir la video ralenti la simultation phun, donc j'ai été obligé de les faire en 320x240 la premiere présente la première méthode qui fonctionne : les masses sont ejectées vers l'extérieur par gravité cumulée au pincement du périmetre total. http://www.thunder-up.com/gravity/MNUL/wor..._25-11-2008.avi dans la deuxieme, j'ai monté les masses en inverse, vers l'interieur. la gravité continue a pincer le périmetre de l'engin, ce qui a pour effet de faire monter les 'bras' bleus. l'effet de levier parait etre actif sur un centre virtuel a l'ensemble. http://www.thunder-up.com/gravity/MNUL/wor..._25-11-2008.avi j'ai une maquette en cours, a 5 bras, mais je suis planté : l'ensemble n'est pas assez rigide , tout force de partout ... c'est l'impasse. a votre bon coeur pour tester la chose si ca vous y croyez mais l'engin a besoin de rigidité. de plus , en 2D , tout va bien, mais le faire en 3d, c'est pas la meme chose : chaque bras l'un derrière l'autre sur un axe unique, chacuns en roulement indépendants , c'est faisable. mais pour les parties aticulées entre chaque bras, il faut aller 'en profondeur' d'un bras a l'autre, et c'est ce qui merde sur ma maquette, pas assez rigide pour supporter ces 'traversées' d'un bras a l'autre. Qu'est ce que vous en dites ? @+ |

|
|
Ecrit le: Mardi 25 Novembre 2008 à 14h29
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
Salut,
merci de partager tes trouvailles. La première vidéo, m'intrigue, car les différents éléments sont symétriques de part et d'autre, je vois mal d'où vient le couple. Pour la seconde, ma fois c'est un beau bordel Difficile d'appréhender le fonctionnement tel quel, je vais essayer de ralentir la vidéo.. Phun est-il un logiciel certifiable du point de vue du réalisme physique ? |
|
|
|
Ecrit le: Mardi 25 Novembre 2008 à 15h33
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
mp_avenir,chaque bras es indépendant de l'autre , ils ont chacun leur roulement , donc l'angle entre chaque bras est variable.
comme chaque liaison bras-bras est articulée, le périmetre 'déployé' de l'engin est plus grand que le périmetre réel qu'il aurait si chaque bras avait 45 degrès entre lui et le suivant. ( 8 * 45 -> 360 ) en l'occurence, on a a peut pres 50 degrès. donc, ce 'rab' de 8*5 degrés = 40degrès se retrouve 'libre'. c'est lui qui 'déforme' l'aspect global , par gravité, en bas de la 'roue'. Je pense que l'effet provient de l'inertie : après l'impulsion initiale, les masses arrivant en bas et écartées du rayon d'origine se trouvent freinées par inertie , mais en freinant , elles provoquent l'écartement de celle qui arrive derrière, et ainsi de suite , car l'ensemble forme finalement une chaine 'infinie' , sous la forme du périmetre de l'engin. Dans la deuxieme vidéo, seuls les 4 bras bleus sont ajoutés. le 'pincement' qui se produit en bas sert a faire monter les bras, de facon a ce que le modele soit toujours en position 'bras de levier' poussés vers le haut , et cherche donc en permanence a retrouver l'equilibre . enfin, c'est ce que je crois avoir compris ... |
|
|
|
Ecrit le: Mardi 25 Novembre 2008 à 19h21
|
|
|
Expert(e) Groupe: Membres Messages: 1753 Membre n°: 291 Inscrit le: 13/06/2007 |
Bonsoir à tous,
Bravo eihis pour cette tentative !! Je ne suis pas le plus qualifié sur le sujet (voir Biganos et Gegyx les pointures en gravité ! ) Je préfère la version 01 plus reposante, Il est évident que phun ne nous dira pas si cela fonctionne, par contre il faut voir calmement le bilan (poids , cinetique etc..) et voir si le bilan est bon voir très bon tu connais les banquiers !! il faudrait faire (si possible) une fenêtre (gauche/droite) et afficher le bilan à chaque mouvement, je ne sais pas si phun peut faire çà ? au moins les poids! Ensuite, si c’est positif ; souscrire ici et financer une maquette en groupe c'est tout simple A++ |
|
|
|
Ecrit le: Mardi 25 Novembre 2008 à 19h38
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
thx4 pas possible sous phun de voir les vecteurs de facon numérique.
j'ai déja assemblé un version a 5 branches sur des pignons sous Phun, et en simulant une charge sur le pignon de sortie, la chose réagit comme elle le devrait : arrivé a un certain couple, ca s'arrete. mais le couple n'est pas en milli newton metres , mais en Nm (je pense au banquier) , et de plus , la vitesse de rotation augmente progressivement pour se stabiliser apres une dizaine de seconde ... donc je suis partagé entre deux trucs : En regardant le systeme, j'ai tendance a accepter sa 'logique'... mais entre l'intuition et le calcul, il y'a un monde... ->Donc soit phun a un ENORME bug , soit ce truc fonctionne, ou en tout cas, le principe est très proche de ce qu'il faut .. pour avoir tripoté phun dans tous les sens, je peux te dire que ce sont les seul montages qui fonctionnent comme ça. j'ai testé des tas de config 'perpetuelles' , de De vinci aux plus récents, et aucune ne marche .. rien , nada , sauf si tu utilise des ressorts ,mais il sont mal modélisés ('parfaits'). Celles ci fonctionnent, et ça m'est paru solide dans le sens ou les changements de masses, les changements de pertes sur les roulements, la vitesse ou on les lance,font directement varier le couple en sortie , ce qui , me semble t-il , élimine la possibilité d'un 'artefact' du logiciel. maintenant, c'est toujours possible - evidemment . |
|
|
|
Ecrit le: Mardi 25 Novembre 2008 à 19h45
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
j'oubliais,j'ai uploadé sur mon serveur une scène Phun complete, avec un engin a 5 branches, couplé a une roue+pignon, si vous voulez tester le truc , c'est ici :
http://www.thunder-up.com/gravity/MNUL/wor...avec_charge.phn l'interessant, c'est que dans ce cas la , c'est l'inertie de la roue 'flywheel' qui freine la descente des masses : du coup, l'ensemble des 5 bras bénéficient de ce frein inertiel plutot que d'en patir. pour démarrer l'engin, faire une rotation dans nimporte quel sens, sur la roue ou sur un des bras de l'étoile. |
|
|
|
Ecrit le: Mardi 25 Novembre 2008 à 21h03
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonsoir à tous,
eihis, merci d'avoir partagé tes expériences avec PHUN. C'est intriguant tes résultats, je vais essayer de refaire ta première simulation avec la version 4.22 alors que toi tu l'as effectuée avec la version 4.12. Il y a 3 versions intermédiaires entre ces 2. L'idéal c'est que tu refasse également ta simule avec la dernière version. J'ai constaté de petits bugs de comportement graphique et d'utilisation pour la version 4.22 pour Mac. Je ne sais pas comment importer ton dernier fichier .phn A+ |
|
|
|
Ecrit le: Mardi 25 Novembre 2008 à 23h43
|
|
|
Expert(e) Groupe: Membres Messages: 2064 Membre n°: 275 Inscrit le: 11/06/2007 |
Merci et Bravo Eihis pour ton Octopode
C’est deux jolies animations de Noël que tu nous offres là… C’est fun ! __ Cela me rappelle l’animation sur une ancienne page (de Quartz ?), avec des bras libres également, mais serrant des boules dans leurs mouvements. Finalement le bilan était égal, il me semble. Avec ce démarrage, et celle vélocité, sous Phun, cela doit encourager évidemment à poursuivre et à se lancer dans une maquette. Elle ne doit pas être insurmontable. Si la maquette tourne, c’est bon pour les yeux et les vitrines de Noël des Galeries Lafayettes. Mais pour entraîner un axe, il faudra élaborer des tirants élastiques. Quoique, on pourrait faire un ventilateur, avec une pale légère sur chaque bras indépendant. -- Thx 4 / « Gegyx, pointure en gravité » Là, tu déconnes. Avec ironie, tu ne fais référence, qu’à mon poids sur la balance, et à mon caractère sombre… |
|
|
|
Ecrit le: Mercredi 26 Novembre 2008 à 07h41
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
yo Derfla , désolé , je ne voispas trop ou est le probleme.. les format de fichiers ne sont pas les memes ??? je pensais que ce genre de hic était réglé depuis longtemps...
pas trouvé de topics sur le net pour convertir les scenes, désolé .. sinon, j'ai installé la 4.22 , meme topo , aucun changement , ça tourne (la garce!) cet engin me fait penser aux chaines qui tombent d'une poulie de bateau , et s'entrainent toutes seules par leur poid, sauf que la, elle n'a pas de fin. @+ pour des news ! |
|
|
|
Ecrit le: Mercredi 26 Novembre 2008 à 07h51
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
ça augure bien..
il y a peut-être des gens qui pourraient tenter une simu sous IP ? sinon j'ai un contact qui est en formation pro, il a sûrement accès à des logiciels intéressants. Avant de se lancer dans une maquette coûteuse il faudrait vraiment croiser les résultats sur au moins 3 logiciels différents.. |
|
|
|
Ecrit le: Mercredi 26 Novembre 2008 à 07h58
|
|
 Passionné(e) Groupe: Membres Messages: 64 Membre n°: 6267 Inscrit le: 21/10/2008 |
Salut à tous,
Pensez vous que de passer par un logiciel de simulation soit une solution qui permet d'avancer pluis rapidement? Que pensez vous de la machine "Finsrud's Perpetuum Mobile "? Elle a été vérifier? A+ |
|
|
|
Ecrit le: Mercredi 26 Novembre 2008 à 10h54
|
|
 Expert(e) Groupe: Membres Messages: 460 Membre n°: 283 Inscrit le: 12/06/2007 |
Bonjour, à tous.
Merci eihis de partager tes secrets, j’ai le même problème que Derfla avec le fichier que tu as mis en ligne, Phun ne le reconnaît pas. J’ai longuement observé les deux animations, je ne suis pas un spécialiste en gravité, mais j’ai du mal à comprendre pourquoi ça tourne. Pour en avoir le cœur net, le mieux est d’en construire un, le premier n’est pas très compliqué à faire, il y a un peu de boulot, mais rien d’insurmontable. Moi pour l’instant, j’ai déjà mon montage en cour, qui consomme le peu de temps que j’ai à consacré à cette quête. A plus. |
|
|
|
Ecrit le: Mercredi 26 Novembre 2008 à 14h13
|
|||||
|
Expert(e) Groupe: Membres Messages: 2064 Membre n°: 275 Inscrit le: 11/06/2007 |
Eihis / SVP, pour bien comprendre et partir sur des bases connues.
Les poids sont pendus par des ficelles toutes d’égales longueur ? Un poids est égal à 3, quand un bras (un rayon) pèse 2 ? Y-a-t-il une proportion entre un poids et la longueur d’un bras ?
Tu as tenté une maquette de la première animation à 5 rayons ? Matière, structure et dimension d’un bras (rayon)? Matière, structure et dimension d’un poids ? -- Quand j’aurai du temps (?), je tenterais bien une maquette mais avec des rayons en plat de fer (que j’ai) de 20x3. Et c’est lourd. Donc les poids doivent l’être encore plus… |
||||
|
|
|
Ecrit le: Mercredi 26 Novembre 2008 à 17h58
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonsoir à tous,
Eihis, aujourd'hui c'est la journée des questions. En attendant l'arrivée du soft de simulation 3D Newton, j'ai essayé mais pas encore réussi à reproduire ton concept qui m'interpelle passablement. Question 1 : Tes 8 bras/ rayons sont ils sous tension ou bien y at-il un petit jeu entre chaque roue / poids et le stator ? Question 2 : L'axe central est-il flottant ou bien fixé sur le stator. Si on arrive à reproduire ton effet avec 2 softs différents alors j'aurais assez de courage pour me lancer dans une maquette. Chat échaudé craint l'eau froide... Pour la simule j'essairais également d'éviter d'avoir 8 bras sur des plans de rotations différents. Je verrais un petit moyeu comme celui d'une roue de vélo où viennent se fixer les rayons de la roue. A+ |
|
|
0 utilisateur(s) sur ce sujet (0 invités et 0 utilisateurs anonymes)
0 membres:
 Pages: (242) « Première ... 112 113 [114] 115 116 ... Dernière » Pages: (242) « Première ... 112 113 [114] 115 116 ... Dernière » |
|
[ Script Execution time: 1.0169 ] [ 12 queries used ] [ GZIP activé ]