
| chercheursduvrai.fr |
 Aide Aide
 Recherche Recherche
 Membres Membres
 Calendrier Calendrier
|
| Bienvenue invité ( Connexion (Log In) | Inscription (Register) ) | Recevoir à nouveau l'email de validation |

 To view this board in english, you must be registered.
To view this board in english, you must be registered.
| Pages: (242) « Première ... 113 114 [115] 116 117 ... Dernière » ( Aller vers premier message non lu ) |    |
|
Ecrit le: Mercredi 26 Novembre 2008 à 19h04


|
|||||||||||||
|
Expert(e)  Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
b'soir m'sieur dames ! alors , en série de réponse :
j'en suis persuadé, dumoins au niveau de la mécanique 'classique', meme sans chercher a utiliser la gravité ou le magnétisme. Ca evite des sales surprises de conception, et , meme si PHUN se plantait au niveau de la gestion de la gravité, il restera un excellent logiciel de simulation mécanique 2d.
Que du bien A propos de 'la chose' , maintenant.
entre chaque bras, il y'a 2 éléments ( des 'traverses') , entre eux, une articulation (roulement). ce ne sont pas des ficelles. Le poids est mis au niveau de ce roulement du milieu. Si le a cet endroit fait 3kg, alors le poids en bout de bras est de 2kg (si on néglige le poids du bras) De toutes facons, ces valeurs sont assez empiriques. simplement, au dela d'un rapport 2 pour 1 , ca ne marche plus trop bien, et a 1 pour 1 idem Le rapport poids/longueur du bras determine le couple en sortie, sur chaque bras. Comme on peut le voir sur la video, a chaque passage en bas de la rotation, le bras concerné ralenti, pendant l'ecartement de la masse. comme chaque bras est indépendant, on obtient pour chacun ce ralentissement a un moment différent du temps de rotation. bon evidement, ca n'est pas un probleme si on couplait des alternateurs sur chaque bras. mais pour monter tous les bras sur une seule et meme 'flywheel' de sortie, c'est plus complexe . c'est ce que j'ai fait dans le fichier phun que j'ai joint précédement, avec une version a 5 rayons. au dela, le 'delta' des vitesses entre chaque bras interdit le meme montage 'flottant' que j'ai réalisé dans ce cas précis.
oui, mais comme je le disais, c'est planté. la raison : manque de rigidité de l'ensemble. j'ai utilisé des profilés alu 'U' de 20x20mm , pour les bras et les 'traverses'. sur ma maquette, il y'a cinq bras. ce qui fait : __ 5 bras ALU , distance entre le roulement 'axe' et celui des traverses : 39cm __ 2*5 traverses ALU , distance roulement-roulement : 24cm ( donc il y'a 48cm, traverses 'déployée' a son maximum , d'un bras jusqu'a l'autre. __ 5 roulements sur l'axe , plus 5 roulements en milieu de traverses , plus 2*5 roulements au niveau des bouts de bras, chacun allant vers un coté et l'autre de ce meme bras. concernant les poids en eux meme, je cherche encore une solution facilement configurable, actuellement j'ai simplement fixé des reste d'alu plein que j'avais sur des CD , dont j'utilise le trou central pour permettre leur fixation aux endroits voulus. Mais la solution que j'ai choisi pose probleme : il y'a trop de forces au niveau de la jonction axe-bras . il y'a des forces latérales du fait des masses pendues entre chaque bras, et ces force 'de biais' fait bloquer mes pauvres roulements. ceux ci , 'collant' trop a l'axe, ruinent l'effet de liberté nécéssaire au bras qui passent 'en bas' , pendant la rotation. il m'aurait fallu des coniques ... enfin au moins déja en mettre 2 pour chaque bras, a moins de trouver une solution qui soit plus 'plane' que ma solution actuelle. car actuellement, et vu les dimensions des U alu et celles des roulements, l'ensemble des 5 bras représente une 'profondeur' sur l'axe , d'environ 27cm. autant dire que l'axe lui meme (tige filetée de 10) , en prends déja dans la 'gueule'...
je ne suis pas sur de bien comprendre, mais comme je l'ai dit, le périmetre 'déployé' est plus grand que le périmetre du cercle 'virtuel' que composeraient l'ensemble des bras. donc il y'a un jeu, si c'est ce dont tu parles. en l'occurence, ce jeu, au repos, permet d'avoir a peu prés 40degrès de 'rab', si on reporte tout sur un seul des angles. sinon, il est réparti en 8*5 degrès de 'rab' (grace aux longueurs des 'traverses').
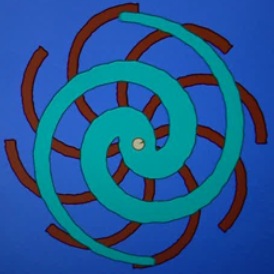
Il est fixé sur le support (bati) : rien n'y est fixé, tous les bras sont sur roulements. c'est mon probleme sur ma maquette : celui ci tourne et force, signe que ca bugge au niveau de la répartition et de la construction.les forces 'de biais' sur les bras (effet de levier) viennent flinguer l'effet des roulements.(mais je n'en ai mis qu'un par bras...c'est une erreur voili voilou : je trouve désolant qu'on ne puisse pas echanger les fichiers PHUN. j'ai sauvé les fichiers depuis PHUN pour PC .. vous avez tous des MAc ou bien ..??? PS (edit) ici, une capture écran de l'octogone, si ca peut aider : http://www.thunder-up.com/gravity/MNUL/ima...ogone_phun1.jpg et ici, la version pentagone, avec un systeme de 'flywheel' pour réunir les energies des 5 bras en meme temps sur une seule 'roue' de générateur http://www.thunder-up.com/gravity/MNUL/ima...agone_gear1.jpg |
||||||||||||
  

|
|
Ecrit le: Mercredi 26 Novembre 2008 à 20h37
|
|
 Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Cette fois j'ai bien compris. Je croyais faussement que les poids bleus en bout de bras roulaient autour d'un stator et je voyais des difficultés de réalisation déjà pour la simulation elle-même. Cette fois je dois pouvoir réussir à reproduire ta simulation. Thank you Sir eihis.
A+ |
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 07h32
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
Rien a voir avec la choucroute (quoi que..) , mais vou sn'auriez pas un lien vers un ptit soft gratuit de simulation magneto-statique ?
j'avais vizimag, mais les 30jours sont bien loins , et j'ai déja eu quickfield (student) , mais le nombre de noeuds était trop bas pour avoir des résultats valables sur de grands 'montages'... any link ? Merci |
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 17h53
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
Bon j'ai un contact qui peut éventuellement faire une simu avec "cosmos motion". qu'est-ce que ça vaut ? (ça fonctionne avec solidworks)
|
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 18h35
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
Bah ca vaut surement autant que Phun, solidworks c'est pas de la ' fiante de pigeon ' pour modéliser ...alors bon...
pour Derfla , j'ai fait 2 captures avec ma webcam de me..e , c'est tout vilain , mais ca donne une idée de la facon dont j'ai attaqué le probleme (et comme je le disais, j'ai de gros problemes de rigidite+foirage sur les roulements) ici , 2 photos donc :   comme on peut le voir, les 'traverses' vont en 'profondeur' d'un bras a l'autre. le hic, c'est que quand une masse se trouve en haut ou en bas, y'a un 'porte a faux' qui fait 'flécher' les bras, vers l'interieur...et donc ca force sur les roulements au niveau de l'axe... |
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 19h35
|
|
|
Passionné(e) Groupe: Membres Messages: 58 Membre n°: 4240 Inscrit le: 18/08/2008 |
salut à tous
je trouve le concept intéréssant et j'ai commencé à le modélisé sur solid works mais la je bloc au niveau des rapport de longueur des bras. En faite j'arrive pas à fermer les 8 bras avec les double liaisons intermédiaire.???? pourtant je sui partie d'un octogone mais ca veux pas le faire???? |
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 21h24
|
|
 Expert(e) Groupe: Membres Messages: 100 Membre n°: 4725 Inscrit le: 02/09/2008 |
Salut à tous,
Pour Heihis : Pour ton montage ne serait-il pas plus simple de rassembler tes 8 bras de départ à l'aide d'une seule pièce centrale qui permettrait de gagner en rigidité et de faire en sorte que tes 8 bras soient dans un seul plan ? 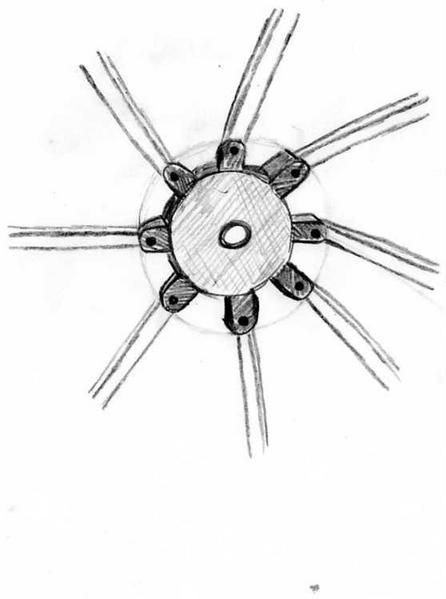 -------------------- |
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 22h20
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonsoir à tous,
Eihis, j'ai de la peine à voir tes photos, mais j'ai bien compris le problème mécanique. C'est pourquoi je pense comme jys17 et je l'avais déjà relevé dans un post précédent : il faudrait essayer de mettre les 8 bras sur le même plan de rotation mais sur un moyeu à cliquets. J'ai essayé de simuler cette solution mais sans le cliquet cela ne vas pas . Le moyeu reviens en arrière et les bras basculent tous dans un coté et tout s'arrête. Je vais essayer de simuler avec une roue à cliquet et on verras. Malheureusement je peux pas sauvegarder les fichiers Phun le Mac se plante chaque fois lors de la manoeuvre de sauvegarde. Avec Phun Windows je peux sauvegarder mais Phun se ferme intempestivement , c'est une vraie galère. J'ai choisi le moindre mal , je préfère la version Mac. Voici la vidéo de simulation Phun 4.22 pour Mac du moteur gravitationnel eihis VIDEO DE LA SIMULATION PHUN DU CONCEPT DE EIHIS SUR SON MOTEUR GRAVITATIONNEL Les valeurs des poids, longueur de bras ne sont pas optimalisées . J'ai gardé les paramètres par défauts avec coefficient de frottement de 0,5 ce qui est vraiment grand mais j'ignore que cette valeur s'applique pour les axes avec roulements de Phun. Je vais faire encore des essais pour pouvoir augmenter la vitesse de rotation. A+ P.S J'allais oublier les valeurs, car demain il me restera que la vidéo de la simule. Grand poids à l'extrémité de chaque bras : 33 kg Petit poids entre les bras : 15,6 kg Bras 3,2 Kg Bras transversal par pièce ( il y a 16 en tout ) 0,94 Kg |
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 22h31
|
|
 Expert(e) Groupe: Modérateurs Messages: 4027 Membre n°: 181 Inscrit le: 07/10/2006 |
Bonsoir à tous,
Pas très présent ici en se moment, mais je vous lis assidument, La réalisation en cours me semble intéressante, à propos, je suis tombé sur un brevet, Je pense que cela peut apporter de l'eau à votre moulin. les pages 13 et 16 sont très intenses, enfin je trouve. Vous pouvez le consulter ici, il est récente. Ta simulation est étonnante Derfla, la chose qui m'interpelle, est la non détermination ou orientation intrinsèque du sens de rotation. A+++ -------------------- Chaque minute qui passe est une occasion de changer le cours de ta vie.
Page YouTube, Page Dailymotion, Album Picasa, La Force contre-électromotrice, simulation magnétique, Viktor Schauberger |
|
|
|
Ecrit le: Jeudi 27 Novembre 2008 à 22h47
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Oui quartz, tout est étonnant dans ce montage. Demain je vais essayer de lancer à la main le système dans un sens et dans l'autre pour voir s'il y a un sens préférentiel. Il se peut bien qu'il prend naturellement la direction d'un déséquilibre statique inmanquable dans un tel dessin assez imprécis au possible.
A+ |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 08h14
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonjour à tous,
La nuit porte conseil : eihis le problème mécanique peut être résolu facilement , il suffit de doubler les bras dans la profondeur et de les relier par paire avec un axe . On peut ainsi avoir les poids transversaux dans un même plan de rotation. Si j'ai pas été assez clair je peux faire un dessin. A+ |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 12h28
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
bonjour m'sieur dames (humour)
Jys meme si ca parait 'brut', j'ai pas mal cogité sur le concept avant d'en parler, et la solution du moyeu a déja été testée sous phun, mais ca ne marche pas. comme le dit très bien derfla, tout se met a vriller. les axes doivent rester sur l'axe central, ou bien si on les deporte avec un moyeux, il faut effectivement un systeme supplémentaire pour eviter la torsion de l'ensemble du systeme, c'est pour cette raison que j'ai opté pour les laisser sur l'axe principal... et opté pour une 'flywheel' exterieure , comme je l'ai montré dans une des photos , avec un modele a 5 branches. A part ça, derfla, la diffusion sur dailymotion ma un peu crispé (rémanence de comportement ecureil ?) j'aurai préféré qu'on reste en petit comité sur le sujet ( paranoiaque moi ? ) mais bon... c'est fait, c'est fait.. Sinon, pour le sens 'préférentiel', j'ai noté que selon les assemblages, effectivement, il y'a un sens de démarrage préférentiel, mais dans tous les cas, une impulsion a l'inverse de ce sens fait quand meme tourner l'engin dans le sens voulu. forcement, l'ajustement au 1000eme n'est pas parfait sou phun, et j'en ai conclu que ce sens preferentiel venait de la, et egalement du fait que si tu met par exemple 0.5nm de 'serrage' sur les roulements, selon comment tu as empilé les bras au niveau de l'axe, tu cumule ces frottements, puisque chaque bras est 'monté' en roulement sur le precedent.. du coup, le 8eme bras (pour un octogone, se prend 7*0.5nm de 'serrage' roulement... alors qu'en réalité, s'ils sont tous montés sur un axe unique, ca ne se produirait pas.. Taramop , je ne sais pas quelles longueurs tu as pris. j'ai donné des longueurs dans un post précédent qui concernaient une etoile a 5 branches, pas a 8. si tu pars sur un octogone, modelise un octogone parfait avec donc 45 degres entre chaque branche, puis reprend une des 2 traverses, et tu la rallonge disons de 10 a 15% , puis tu t'en sers de 'modele' pour faire toutes les traverses finalles (originale + 15 autres , donc). la circonférence totale réelle est supérieure a la circonférence 'théorique' que fait l'etoile (quelle que soit sont nombre de branches), si elle est strictement aux angles du polygone correspondant.. (pas sur d'etre clair, sur ce coup la |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 15h51
|
|
 Expert(e) Groupe: Membres Messages: 460 Membre n°: 283 Inscrit le: 12/06/2007 |
Bonjours à tous.
Ehis : J’ai réussi à charger ton Penta, je l’ai lancé à la main et il accélère de plus en plus, pour se stabiliser à 4 rads, ce truc est génial je croise les doigts pour que Phun ne génère pas un effet fantôme. Félicitation ehis, pour ta présentation Si j’ai bien compris ce sont les comptas qui transmettent le mouvement à la couronne. Pour Derfla, il faut dans le répertoire : Scène de Phun, éditer un fichier existant avec le bloc note, et remplacer le contenu du fichier par celui que ehis a mis sur son serveur, par un simple copié coller, et enregistrer le fichier modifier. À plus. |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 16h30
|
|||
 Expert(e) Groupe: Membres Messages: 2064 Membre n°: 275 Inscrit le: 11/06/2007 |
Salut, c'était aussi la solution évidente, que j'envisageais pour une maquette avec les bras en fer plat, dans un précédent post. (tu vois, pas si mou le gegyx, pour les idées, seulement velléitaire !) Tu as vite maîtrisé Phun. Tu m’as fait rire en le prononçant : « Foun » Pour ma part je me contenterais d’une petite simulation. Une « foufoune » en quelque sorte… --- Cette nuit, j’ai veillé pour monter et avancer une simulation. Pfff ! Cétait en bonne voie, sauf qu’à la fin, la roue n’était plus fixée au fond par l’axe de rotation. Faut démonter tout et recommencer inlassablement le remontage, mais en ce moment, j’ai trop de démarches domestiques à faire par ailleurs. |
||
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 17h10
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
cisco comme tu dis... si phun pouvait ne pas se planter ...
a un moment, en réfléchissant au truc, je me suis dit que le solveur de phun avait peut etre un probleme, pour les montages 'en boucle' : en gros, je me demandais s'il ne 'tournait pas en rond' dans la résolution de l'impulsion d'origine, ce qui pourrait créer ce bug. mais merde, en faisant plusieurs montages, différentes tailles, etc, on modifie l'ampleur de la rotation. si on merde sur les poids, la chose ne tourne plus ... alors bon... si c'est un bug de ce genre bah... c'est vraiment LE montage qu'il ne faut pas faire, parceque je ne l'ai jamais vu avec aucun autre . a part ça, pour le montage en penta, effectivement c'est les 'compas' qui transmettent l'energie a la roue exterieure. j'ai remarqué que le meme montage avec un octogone, ne 'passe' plus. le 'grand ecart' des bras, en bas , est trop important pour etre encaissé par les 'compas', et la roue exterieure se met a avoir trop de retard/avance (a cause de l'inertie) par rapport au bras qui est ralenti , et du coup, ca foire , les compas se mettent a délirer... à 5 , ca tient la route... la roue prends de l'avance ou du retard, mais le compas 'encaisse' et ça permet de coupler les 5 bras sans pb... de toutes facons, j'ai essayé aussi des montages a pignons sur chacun des bras, ca marchait aussi , mais la vitesse de rotation en sortie de chaque bras n'est plus 'linéaire' ( ce que derfla fait remarquer dans la video : forcement, la vitesse angulaire du bras diminue au moment de son passage en bas ), et on se retrouve avec 5 sorties 'rotatives' qu'il faudrait coupler a un alternateur chacune... sinon, j'ai bien pensé a faire un systeme différentiel, mais sous phun, pas de 3d possible , et de plus, la , il s'agit de faire un différentiel a X entrées pour une sortie lol... a vos papiers ! en fait , quand on en sera au couplage.... ca sera de la gnognotte lol. quand au fait que le truc tourne, c'est une affaire d'inertie a mon humble avis. .....le couperet solidworks devrait tomber un de ces 4 ! |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 18h29
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonsoir à tous,
Désolé eihis pour le fait d'avoir édité sur Dailymotion mais tu doit comprendre que sur notre forum on montre tout ce qui pourrais être intéressant . Cela fait bientôt 2 ans que j'ai pris cette habitude et pour moi s'était une simple routine. D'ailleurs je ne saurais faire autrement pour montrer une vidéo. Mais comme c'est toi le patron pour ce concept , dit moi comment il faut procéder à l'avenir : comment transmettre des vidéos qui font plus de 50 Mo aux membres du forum du MP ? Je confirme le sens de rotation préférentiel d'un montage à 8 bras. Et j'arrive aux mêmes résultats en lançant à la main en sens contraire, le système ralenti peu à peu et repart dans le bon sens pour accéléré à son maximum. Mais ce qui me chicane : pourquoi le sens préférentiel est-il toujours dans le sens horaire ? Je n'ai jamais eu de système qui tournais dans le sens ah. En augmentant les poids transversaux j'ai constaté que le système tournait plus vite. Avec un rapport des poids de 14 ( quatorze ! ) , donc les poids transversaux sont beaucoup plus lourd que les poids au bout des bras, j'arrive à env. 8 radians par seconde. Mais en faisant un arrêt sur image je constate qu'on dépasse la résistance des matériaux que j'avais choisi, les axes sont décalés de façon typique. Cisco, je vais essayer de suivre tes conseils , merci. Gegyx j'ai pas enregistré le fait que tu avais déjà proposé la solution évidente. Cela m'est aussi arrivé plus d'une fois que tout le système décroche et disparaît de l'écran. J'ai pas encore compris ce qu'il faut faire ou ne pas faire pour éviter cette agaçante initiative de PHUN. A+ |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 19h38
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
derfla comme je t'ai dit , si c'est fait, c'est fait.
si nécéssaire dans l'avenir, je créerai un compte ftp sur mon serveur , de facon a y uploader les videos ( un logiciel de FTP gratuit fera le transfert) .. enfin, je propose apres hein... sinon, si le truc tourne tjs dans le meme sens, c'est que ton assemblage a un 'gros' décalage , au final. dans le fichier 'penta' dont j'ai donné l'url , le penta tourne dans un sens ou l'autre, sans problemes, parcequ'il est très bien equilibré. multiplier le nombre de bras multiplie les erreurs d'assemblage... tu devrais faire la manip décrite pour pouvoir utiliser mon fichier (ouverture bloc notes , sauvegarde ..) ca pourrait t'aider a y voir clair ! @+ ps : en général, si tout le systeme disparait de l'écran, c'est que des matériaux sont directement en contact (se superposent). au démarrage de la simule, ca explose tellment vite que tu crois que l'ensemble a 'disparu' de l'écran |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 20h10
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
Je vais bientôt envoyer le schéma au gars pour Solidworks; Derfla : as-tu trouvé un jeu plus efficace de valeurs en masse ? Sinon je transmet celles de ta dernière vidéo.
|
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 21h28
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
mp-avenir je viens de commuter sur Windows et c'est avec l'Internet Explorer que je communique et je n'ai plus les valeurs exactes de la simule en cours mais je me souviens que les poids au bout des bras radiaux étaient à 2,4 Kg et les poids transversaux étaient à 34 Kg soit avec un rapport de 14. Le poids de chaque bras transversal était à env 1kg. Je me souviens plus du poids des bras radiaux , mais ce n'est pas un paramètre aussi sensible comme les autres apparamment. Avec ces valeurs j'obtenais une vitesse angulaire oscillant entre 7 et plus de 8 rad/s. Cela tournait tellement rapidement ( tout est relatif , env. 66 t/min ) que je devais réduire la vitesse de simulation de 10 fois. Je suis arrivé à la conclusion que ces valeurs ne semblaient pas du tout critique ,on peut les varier comme on veut quand le poids transversal est plus grand que le poids du bras radial. Mais tout ça est encore à confirmer avec d'autres dimensions géométriques.
A+ |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 21h57
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
Ok, je vais transmettre tout ça
Par contre je suppose qu'il ne pourra pas faire de simulation avant la semaine prochaine (le logiciel est à son bahut) En simplifiant les valeurs ça donne :  |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 22h18
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Euh ! je pensais plutôt l'inverse 35 kg pour le petit poids vert foncé ( transversal )et 4 kg pour l'autre pour avoir un max de vitesse correspondant un peu près avec ma dernière simule et que je dois chaque fois redessiner puisque je peut pas la sauvegarder.
A+ |
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 22h23
|
|
|
Expert(e) Groupe: Membres Messages: 505 Membre n°: 280 Inscrit le: 12/06/2007 |
Ok j'avais mal lu, c'est corrigé
|
|
|
|
Ecrit le: Vendredi 28 Novembre 2008 à 22h41
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Punaise! J'ai enfi réussi à importer les différentes figures PHUN que eihis a donné mais je n'arrive pas à importer sa simule penta. Je dois être fatigué, demain est un autre jour.
A+ |
|
|
|
Ecrit le: Samedi 29 Novembre 2008 à 15h47
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
35kg en bout de bras, tu es en étirement de matieres (les roulements 'hinges') se déforment.
pour le vérifier, met leur limite de cassure en dessous de +inf tel que c'est par défaut |
|
|
|
Ecrit le: Samedi 29 Novembre 2008 à 18h27
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
On est parfaitement d'accord à ce sujet, c'est pourquoi j'avais relevé ce fait dans un post précédent par " dépasse la résistance des matériaux " . On pourrais aussi dire par : dépassement des charges admissibles . Il faut pas oublier que 35 kg avec env. 66 t/min c'est pas le bout du monde au niveau de la résistance des matériaux. Mais nous ignorons comment ces limites dépassées influencent sur les calculs de l'ensemble de la machine et de son régime maximum final atteint. Pour augmenter ces limites il faut augmenter le "poids spécifique" kg/m2 dans Formes ---> densité (poids) qui est par défaut est à 2 kg/m2. Tout cela tu le connaît mieux que moi. Mais c'est peut être utile pour ceux qui voudrais se lancer avec PHUN.
Je suis encore à faire des simulations de tout poil pour encore mieux maîtriser Phun et surtout pour trouver des combinaisons plus performantes ou simplement optimales. S'il ressort des données intéressantes de tous ces bidouillages je me sentirais alors obligé de faire une petite vidéo et de la mettre en ligne , sauf avis contraire explicite de ta part. A+ |
|
|
|
Ecrit le: Samedi 29 Novembre 2008 à 19h48
|
|
|
Expert(e) Groupe: Membres Messages: 183 Membre n°: 3535 Inscrit le: 18/07/2008 |
pas de panique mon ami,
comme je t'ai dit, j'ai le démon de l'écureil qui ressort de temps a autres, mais c'est toi qui a raison, autant diffuser le plus largement ! |
|
|
|
Ecrit le: Dimanche 30 Novembre 2008 à 10h15
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonjour à tous,
Voici une vidéo d'une simulation qui me laisse quand même perplexe car je n'arrivais pas à faire tourner le système avec les poids uniformément réparti, c'est comme si tout dépendait des conditions initiales de la simulation et qu'on introduit de ce fait une plus grande imprécision des calculs et ces conditions initiales sont en fait irréelles puisque tout le système reçoit les poids au moment du départ avec une énergie irréaliste par rapport à un montage physique. Simulation MG 2 avec poids asymétriques Tout ceci rejoins finalement les expériences de eihis et les miennes non publiées où on lance à la main le système en sens contraire et finalement le système accélère dans son sens préférentiel inverse au sens de lancement. On peut aussi très bien interpréter cette expérience comme un indice sérieux comme quoi il y a quelque chose de sérieux dans ce genre de concept car le déséquilibre initial est visiblement dans le sen horaire pour finalement tourner dans le sens ah. Pour l'instant je navigue dans le brouillard de l'incertitude. Il faut attendre 5 min pour télécharger, c'est moins pratique que Dailymotion mais plus discret. Si cela ne convient pas je me ferais un plaisir de mettre le fichier sur Dailymotion. A+ |
|
|
|
Ecrit le: Dimanche 30 Novembre 2008 à 10h40
|
|
|
Expert(e) Groupe: Membres Messages: 460 Membre n°: 283 Inscrit le: 12/06/2007 |
Bonjours à tous.
Hier soir j’ai refait le système eihis sur phun pour voir si chez moi il fonctionne. Je me suis planté, et j’ai fait les bras secondaires un peu trop courts, ce qui fait que les bras principaux ne peuvent pas bougé.  J’ai quand même lancé la simulation, et à mon grand étonnement, il tourne ! et vite en plus. Désolé ! Je retourne à l’atelier, il y a un gros morceau d’aluminium qui m’attend. À plus. |
|
|
|
Ecrit le: Dimanche 30 Novembre 2008 à 11h50
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
cisco avec une simulation qui tourne avec des poids transversaux sur des bras tendus donne un mauvais point à PHUN. Je crois que le brouillard de l'incertitude s'est encore épaissi.
En rajoutant quelques poids légers ( vert ) sur ma dernière simulation le système tourne cette fois dans le sens horaire et environ à la même vitesse que dans la vidéo ci-dessus. Voici la saisie d'écran avant le clic du départ. 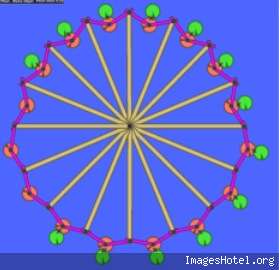 A+ |
|
|
|
Ecrit le: Dimanche 30 Novembre 2008 à 12h29
|
|
|
Expert(e) Groupe: Membres Messages: 2064 Membre n°: 275 Inscrit le: 11/06/2007 |
Avec ces couleurs et ces mouvements, ce sont vraiment des animations de Fêtes !
Et au ¾ de la vidéo, on veut croire enfin au Père Noël ! Bravo Derfla. Tu as du y passer du temps et des neurones, pour échafauder ces montages divers. Finalement foun semble attrayant, convivial et facile d’abord. Mais est-ce une relation sure et solide ? Cisco / je ne sais si tes attaches ont bougées, mais les axes des traverses ne sont pas tous au centre des boules vertes. |
|
|
0 utilisateur(s) sur ce sujet (0 invités et 0 utilisateurs anonymes)
0 membres:
 Pages: (242) « Première ... 113 114 [115] 116 117 ... Dernière » Pages: (242) « Première ... 113 114 [115] 116 117 ... Dernière » |
|
[ Script Execution time: 1.0165 ] [ 12 queries used ] [ GZIP activé ]