
| chercheursduvrai.fr |
 Aide Aide
 Recherche Recherche
 Membres Membres
 Calendrier Calendrier
|
| Bienvenue invité ( Connexion (Log In) | Inscription (Register) ) | Recevoir à nouveau l'email de validation |

 To view this board in english, you must be registered.
To view this board in english, you must be registered.
| Pages: (2) 1 [2] ( Aller vers premier message non lu ) |    |
|
Ecrit le: Mercredi 10 Mars 2010 à 15h39


|
|
|
Expert(e)  Groupe: Membres Messages: 447 Membre n°: 2531 Inscrit le: 06/05/2008 |
C' est vrai que ça bouscoule sacrément notre perception de certains équilibres.
Je finis de fignoler le mécanisme permettant de doser au milipoil la puissance du MM roberval satellite (j' ai trouvé une configuration qui autoriserai même un auto-pilotage pas trop complexe basé sur une plage de Nbr/Tr mn) et je me penche plus avant sur ton schéma démentiel. |
 

|
|
Ecrit le: Mercredi 10 Mars 2010 à 18h00
|
|
|
Expert(e) Groupe: Membres Messages: 447 Membre n°: 2531 Inscrit le: 06/05/2008 |
Voici donc la version « avec commande de puissance » du moteur magnétique roberval à satellites :
 Les 2 double flèches symbolisent des ressort et juste à côté on dispose d’ une vis pour les compresser plus ou moins. Lorsque l’ axe G monté sur glissière se déplace vers la droite, cela permet aux engrenages E et E’ de prendre quelques degrés de gîte horaire, et vice versa. A noter que maintenant les aimants sont montés sur roulement à l’ intérieur même des engrenages E et E’ afin de maintenir en toute circonstance une position // à celle des aimants du flasque. En cas de demande de puissance faible, il faudra visser pour comprimer les ressorts afin que les forces d’ attraction des aimants ne les rapprochent jusqu’ à la butée que l’ on aura pris soin de munir le système, bloquant le rapprochement des aimants juste avant le contact. Au contraire, en cas de forte demande de puissance il faudra dévisser pour laisser les forces attractives des aimants s’ exprimer, la charge jouant maintenant le même rôle que les ressorts auparavant comprimés. On peut donc envisager un système de surveillance de la vitesse de rotation qui donnerai l’ ordre à un moteur pas à pas de tourner la vis dans un sens ou l’ autre en fonction de la charge et de l’ augmentation/diminution de la vitesse de rotation rétablissant sans cesse l’ équilibre. |
|
|
|
Ecrit le: Vendredi 26 Mars 2010 à 14h14
|
|
 Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
Bonjour à tous,
Avant de commencer le travail d'usinage pour le MM en cours, tout le matériel est là, je vous envoie une nouvelle vidéo concernant l'idée d'un MM utilisant 2 systèmes roberval élémentaires qui exploitent deux couples antagonistes générés par 2 aimants, dont un extra long, et qui restent en permanence dans une position orthogonale d'où un déséquilibre permanent. Comme le montage réel est en 3 D , j'ai eu quelques problèmes de gestion des paramètres de collisions et autres. Mais l'essentiel de l'idée est là et elle est compréhensible et réalisable en pratique. Pour éviter l'utilisation d'un aimant si long, on pourrais imaginer d'utiliser à sa place un pseudo stator structuré léger en fil de fer et espacé par des entrefers. L'aimant court serais remplacé par un aimant en U. A+ |
|
|
|
Ecrit le: Samedi 27 Mars 2010 à 20h21
|
|
|
Expert(e) Groupe: Membres Messages: 1346 Membre n°: 274 Inscrit le: 11/06/2007 |
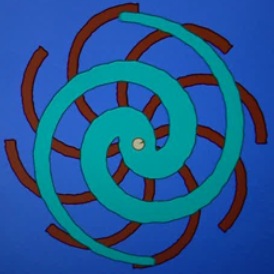
Bonsoir à tous,
Pour me changer du tournage, voici une version améliorée qui donne plus de couple avec des aimants plus courts, donc plus pratiques. Le système est composé de deux montages élémentaires roberval avec un rapport d'engrenages de 1,5 et qui se font face avec chacun leurs 2 aimants. L'engrenage vert portant les 2 aimants verticaux simule un couple h, provoqué par ces derniers, mais le bras jaune tourne ah. L'engrenage violet portant les aimants horizontaux simule un couple ah, provoqué par ces derniers , mais le bras brun tourne h. |
|
|
|
Ecrit le: Samedi 27 Mars 2010 à 20h47
|
|
 Expert(e) Groupe: Membres Messages: 2064 Membre n°: 275 Inscrit le: 11/06/2007 |
Là, il y a autant de boulot que dans "Avatar"...
ou "Titanic" de Cameron, d'ailleurs j'ai le mal de mer.... Bravo pour ces prolongements synaptiques. |
|
|
|
Ecrit le: Lundi 26 Avril 2010 à 19h25
|
|
|
Expert(e) Groupe: Membres Messages: 447 Membre n°: 2531 Inscrit le: 06/05/2008 |
Après un passage par la maquette, Quelques désillusions, mais aussi quelques avancées. Cela dit j’ ai plutôt bien fait.
Cette maquette m’a énormément appris sur le Roberval à engrenages. Et a donné des ouvertures inattendues. Concernant la cinématique du roberval, les satellites E tels que montrés plus haut dans le fil ne se comportent pas comme je le pensais. En fait la solution pour avoir des satellites mûs par les engrenages MAIS immobiles par rapport au rotor était bien plus simple que je ne l’ imaginais, encore fallait-il poser le problème de la bonne façon. Le schéma maintenant applicable est celui que je livre ci-dessous :  On revient donc sur un système mono rotor bien plus facile à fabriquer et à gérer avec UNE grosse différence, le satellite E dont le diamètre double afin de tourner 2 fois moins vite que P. Le récapitulatif ci-dessous présentant les éléments, leurs vitesses et sens de rotation relatifs permet de mieux comprendre la cinématique et le pourquoi de ce doublement de diamètre; (relevés effectués à partir de la maquette, donc réels) Soit sur un tour de rotor en sens horaire : __ I fait 2 tours horaires sur lui-même, 1 tour horaire autour de A, et 1 tour horaire par rapport au rotor __ P fait 0 tour sur lui-même, 2 tour anti horaires par rapport à I, 1 tour horaire autour de A, et 1 tour anti horaire par rapport au rotor __ E fait 1 tour horaire sur lui-même, 1 tour horaire autour de A, et 0 tour par rapport au rotor (E à l’ ancien diamètre aurait fait 2 tours horaires sur lui-même, 1 tour horaire autour de A, et 1 tour horaire par rapport au rotor, comme I) __ le rotor fait 1 tour sur lui-même, et 1 tour par rapport à A On dispose maintenant d’ un élément capable de générer un couple sur P tout en prenant appui sur un rotor suiveur (ou sur le rotor lui-même), ce qui est assez inédit. Ce n’ est pas pour autant que toutes les difficultés sont résolues mais celle du point d’ appui conditionnait toute possibilité d’ aller plus loin. En effet, il ne faut pas oublier que le roberval, même dans cette version rotative, n’ est jamais plus qu’ un système de balance et nécessite par ce fait de trouver un équilibre pour opérer dans de bonnes conditions. On peut le voir littéralement comme une balance rotative avec d’ un côté « la charge » et de l’ autre la « force magnétique » (ou autre) que l’ on pourra régler en tournant l’ axe V donc le pignon A sur lui-même. Trop de charge et le système ne démarre pas. Trop de force et le système tourne et se met en butée. Il y a donc lieu de créer une régulation qui permette au système de ne naviguer qu’ entre les positions « trop de charge » et « équilibre ». Cela ne me semble pas insurmontable du tout compte tenu de l’ état de l’ art actuel. En premier lieu, je préconiserai de mettre un train épicycloïdal entre le rotor et l’ axe V afin de contrôler à tous moments et dans toutes circonstances la position relative de E par rapport au rotor (commande simple de la force motrice, plus de désynchronisation ni de mise en butée de E par rapport au rotor). |
|
|
0 utilisateur(s) sur ce sujet (0 invités et 0 utilisateurs anonymes)
0 membres:
 Pages: (2) 1 [2] Pages: (2) 1 [2] |
|
[ Script Execution time: 0.0469 ] [ 12 queries used ] [ GZIP activé ]